
J'étudie en ce moment deux types de mécanismes, concernant des pinces coupantes à effort démultiplié :
https://www.a4.fr/pince-coupante-de-cot ... 160mm.html
https://www.leroymerlin.fr/produits/out ... 25145.html
Concernant le premier, je pense que c'est assez simple, mais je serais preneur de votre confirmation :
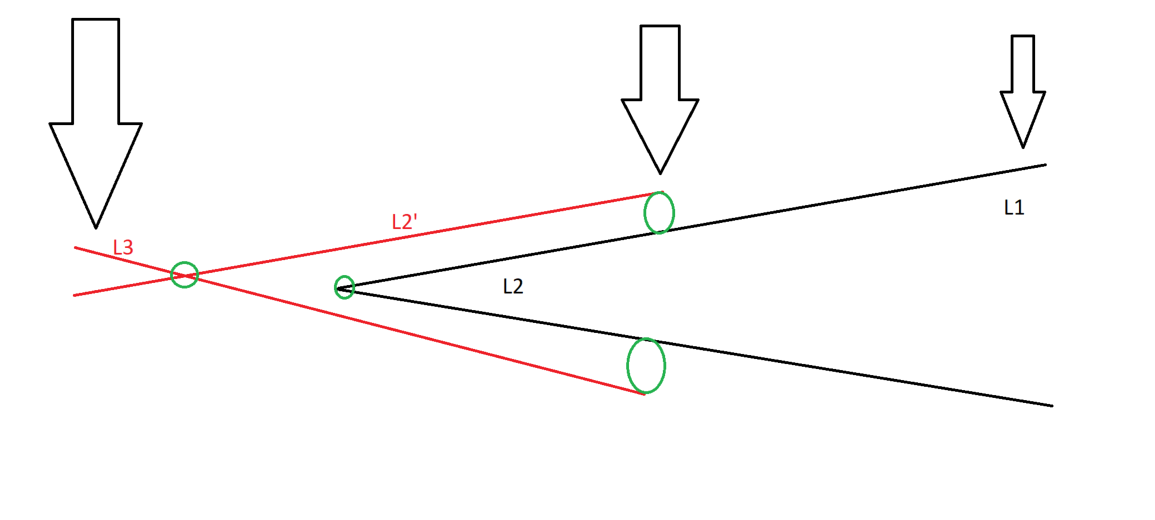
F2 = F1*L1/L2
F2=F2' (égalité de la force à l'articulation joignant les deux corps)
F3 = F2*L2'/L3
Au final, on a F3 = F1*L1/L2*L2'/L3
Par rapport à une pince standard, on aurait F3 = F1*L1/L3
On a donc gagné un rapport de démultiplication de L2'/L2
Dans mon cas (je n'ai pas tout à fait ce modèle) je mesure une démultiplication de 2.4
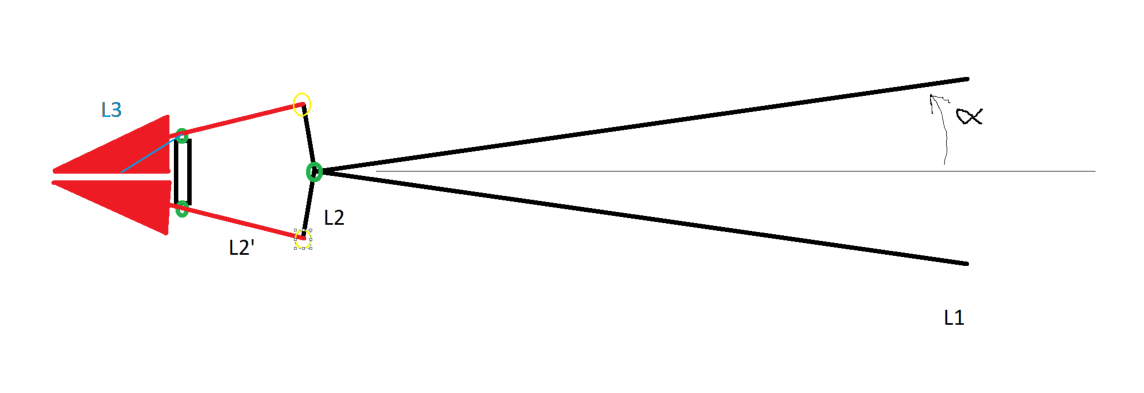
Dans le cas du deuxième coupe boulons ca a l'air moins évident.
Ici le problème c'est qu'on a un mouvement de rotation.
Est-ce qu'on peut utiliser la conservation de l'énergie sous forme de travail, et dire que la force x le déplacement à un endroit vaut la force x le déplacement à un autre endroit ?
Le problème c'est qu'en bonus on a un système qui n'est certainement pas linéaire.
Je tenterais comme ceci (je réfléchis en écrivant) :
F3 = F2*L2'/L3 (est-ce valable dans cette configuration ? c'est peut-être approximatif?)
Ensuite, pour un angle alpha, la position en y du point L2/L2' (charnière jaune) vaut L2*(1-cos(alpha))
Le problème c'est qu'on parle de petits angles alpha quand on serre la pince, donc si on approxime par 1-alpha²/2, on a y2 = L2*alpha²/2 autrement dit pas beaucoup.
Pour un mouvement d'angle dalpha, le mouvement dy1 vaudra tout simplement dy1 = L1dalpha
Par contre, dy2 = L2*alpha
Si on écrit dy1 F1 = dy2 F2 on obtient la même équation que tout à l'heure.. F2 = F1 L1/L2
Au final on a toujours le même résultat, F3 = F1*L1/L2*L2'/L3
Là encore un rapport de démultiplication L2'/L2, pour cette pince, à peine inférieur à 3.
Ai-je fait une erreur ? Le résultat me surprend assez fortement (car il est identique pour un système différent)
Application numérique :
Pour la petite pince, rapport de démultiplication total de 7.2
Pour la grande pince, rapport de démultiplication total de 48
Sachant que la grande pince peut recevoir une force égale au poids d'une personne (voire supérieure s'il saute) tandis que la petite pince reçoit la force de préhension d'une main, 20 à 30kgf pour être raisonnable, donc encore un facteur 3 à 5.
Au final la grande pince serait 25 fois plus puissante que la petite.
